Welcome to My Professional Portfolio
I am Niloofar Zendehdel, a Ph.D. candidate in Mechanical Engineering at the Missouri University of Science and Technology. With a strong foundation in Electrical Engineering, my research is focused on Human-Robot Collaboration (HRC) within the manufacturing sector. I specialize in employing machine learning algorithms to process bio-signals, such as brainwaves, eye gaze, and gestures, for more seamless interactions between human agents and robotic systems.
My technical expertise encompasses hands-on experience with essential technologies in robotics and automation. I'm currently developing a specialized drone, equipped with an RGBD camera, aimed at optimizing tool delivery in industrial settings.
Feel free to explore my page, review my research publications, and watch videos that offer a detailed overview of my work. Thank you for visiting my professional portfolio.
Projects

Titan (Hexacopter)
Titan is designed for the specialized task of tool transportation within manufacturing sectors. The drone will soon be equipped with an integrated gripper and gimbal, enhancing its capabilities for precise tool handling and positioning.

Echo (Quadcopter)
Echo serves as a testing drone for real-world validation of path planning algorithms. After simulation stages and before deployment on Titan, Echo is used to fine-tune these algorithms, ensuring reliable navigation.

GazeAviator
Our EOG-based UAV control system translates eye movements into intuitive drone navigation commands. Utilizing the electrical potential between the cornea and retina, the system converts gaze shifts into flight directions.

Brainwave Signal Classification
In this project, we use electroencephalography (EEG) and advanced machine learning techniques, specifically LSTM and CNN, to accurately predict hand motor movements.
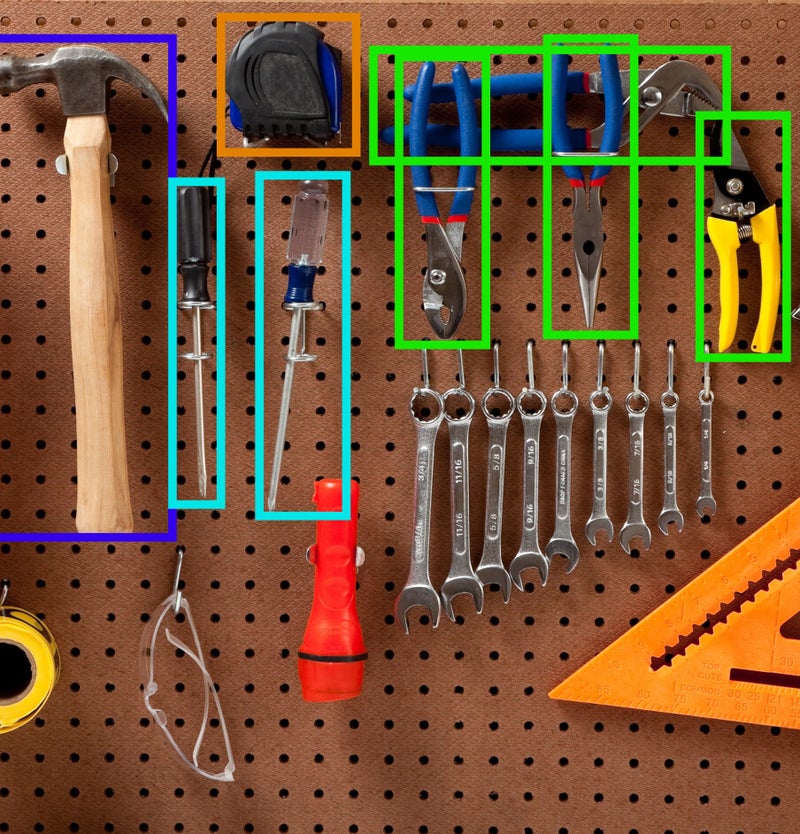
Tool Detection
This Remotely Operated Vehicle was engineered for underwater exploration and data collection. It served as a platform for the development and testing of control algorithms to enhance navigation and operational capabilities.

Artemis (ROV)
This Remotely Operated Vehicle was engineered for underwater exploration and data collection. It served as a platform for the development and testing of control algorithms to enhance navigation and operational capabilities.

Junior Soccer Robots
These robots were built for RoboCup Junior, a competition centered around building autonomous robots that excel in sophisticated tasks such as dribbling and shooting, all while collaborating with teammates.
Download My CV
For a detailed overview of my educational background, work experience, and the projects I've been involved in, feel free to download my CV. It provides a comprehensive look at my journey and skills in the fields of robotics and engineering.